// Program to rotate servo by 5 degree from previous position starting from 0 degree
// 0 degree = 700us
// 180 degree = 5500us
// Timer1 pulse after 50us -23
#include<reg51.h>
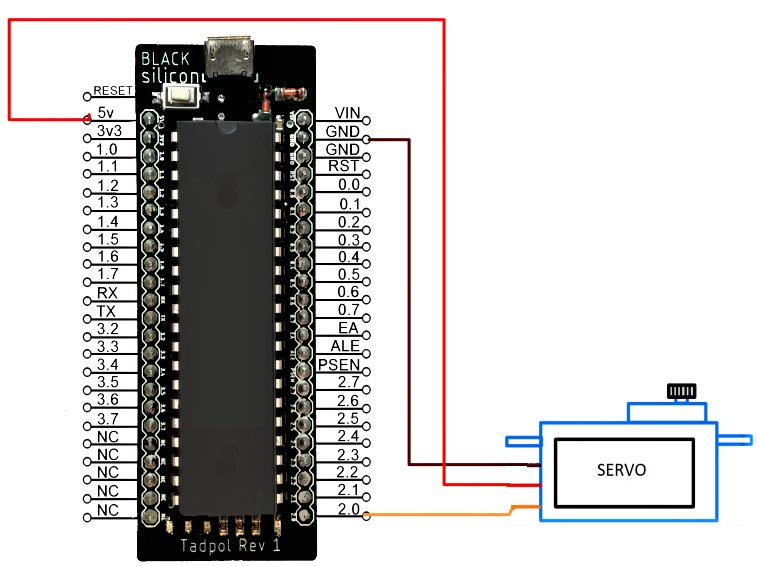
sbit output=P2^0;
int count;
void delay(unsigned int msec)
{
int i,j;
for(i=0;i<msec;i++)
{
for(j=0;j<100;j++)
{
}
}
}
void timer(int msec)
{
int i;
for(i=0;i<msec;i++)
{
while(TF1==0);
TF1=0;
}
TR1=0;
}
void main()
{
int i;
TMOD=0x20; // Mode2
TH1= -23; // 50usec timer
output=0;
count=14;
while(1)
{
if(count>=100)
{
count=14;
}
else
{
count=count+5;
}
for(i=0;i<200;i++)
{
output=1;
timer(count);
output=0;
timer(360);
}
delay(100);
}
}